
Programmieren mit Lego Mindstorms: Farb-, Ultraschall- und Berührungssensor
Im Rahmen des PKS - Moduls "Robotics" haben die 4. Klässler gemeinsam mit Frau Matt unteranderem mit den Robotern von LegoMindstorms gearbeitet. Neben klassischen Vorwärts- und Rückwärtsbewegungen sowie Drehungen haben die Schüler/innen auch eine Möglichkeit gefunden, die diversens Sensoren der Roboter zu programmieren.
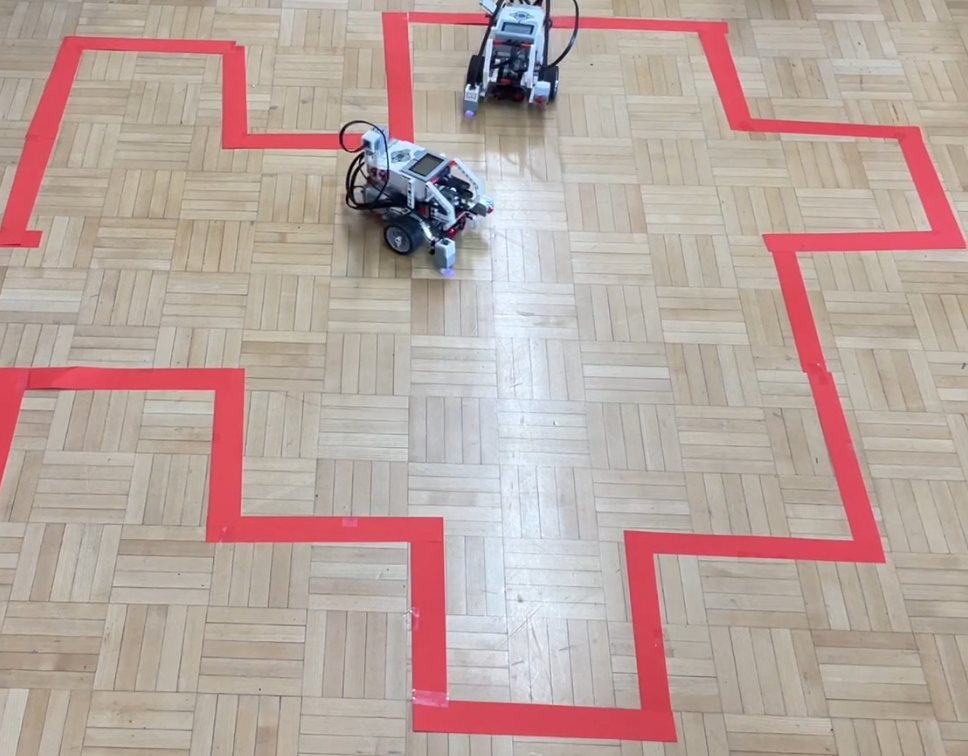
Aufgabe 1 lautete: Der Roboter soll sich innerhalb einer farbig begrenzten Fläche bwegen. Sobald der Roboter die farbig begrenzte Fläche verlassen würde bleibt er stehen, fährt 1 Radumdrehung rückwärts, dreht sich um einen beliebigen Winkel und fährt dann wieder vorwärts weiter bis er wiederum Gefhar läuft die farbig begrenzte Fläche zu verlassen. Technisch findet dieses Prinzip beispielsweise bei einem Rasenroboter Anwendung. Hier ist die Fläche durch ein elektronisches Signal und nicht farblich begrenzt. Hier geht es zum Video!
Aufgabe 2 lautete: Der Roboter soll sich auf dem Tisch vorwärts bewegen. Sobald er droht an der Tischkante abzustürzen soll er stehen bleiben. Auch hier haben wir mit dem Farbsensor gearbeitet. Das jeweils unterschiedlich refelktierende Licht von Tisch und Boden wurde gemessen und anschließend wurden die gemessenen Werte verwendet, um den Roboter entsprechend zu progrmamieren. Hier geht es zum Video!
Aufgabe 3 lautete: Der Roboter soll sich immer im Abstand von 10cm zu einem Objekt das sich vor ihm bewegt vorwärtsbewegen - diese Prinzip kennen wir von adaptiven Tempomaten die bereits in vielen Autos eingebaut sind. Hier geht es zum Video!
Aufgabe 4 lautete: Der Roboter sollte so programmiert werden, dass er beim Anstoßen an einer Wand oder einem ähnlichen Hindernis stehen bleibt, "Ouch" ruft, 1 Radumdrehung rückwärts fährt und sich dann um 90° dreht bevor er wieder geradeaus weiter fährt bis er auf das nächste Hindernis stößt. Dieses Prinzip kommt beipsielsweise bei Staubsaugerrobotern zur Anwendung. Hier geht es zum Video!